


200
评论
查看更多
密码过期或已经不安全,请修改密码
修改密码
壹生身份认证协议书
同意
拒绝
同意
拒绝
同意
不同意并跳过




王昕凝 祖 强 黄 双 卢锦山 董 隽*
( 中国人民解放军总医院泌尿外科,北京 100853)
近年来,肾肿瘤临床特点及手术方式发生明显变化,肾部分切除术成为治疗T1期肾肿瘤的金标准。传统开放肾部分切除术创伤大,现已很少使用。腹腔镜技术已取代开放手术成为肾部分 切除术的首选术式。目前国内肾部分切除术主要采用后腹腔镜手术( retroperitoneal laparoscopic partial nephrectomy,LPN) ,机 器人辅助腹腔镜 ( robotic-assist laparoscopic partial nephrectomy,RALPN) 及机器人辅助后腹腔镜 ( robotic-assist retroperitoneal laparoscopic partial nephrectomy,RARPN) 肾部分切除术也已在国内开展。2013 年8月~2017年8月单一术者行肾部分切除术376例,除LPN 组3例及RALPN组1例因术中肾创面出血中转根治性切除术外,其余 372例均成功完成手术,其中RALPN 138例,RARPN 46例,LPN 188例。本研究对3组共372例手术的安全指标进行回顾性比较,现报道如下。
1 临床资料与方法
1.1 一般资料
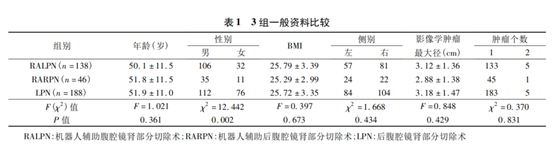
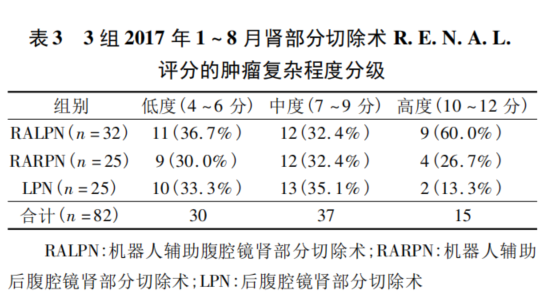
病例选择标准: 术前经 CT、MRI 或超声明确 T1期肾脏占位,并评估肾肿瘤的位置、最大径、与血管及集合系统的位置关系,可行肾部分切除术,双发肿瘤通过影像学检查评估可行保留肾单位手术。单一术者连续完成肾部分切除术 372 例,术前根据中国泌尿外科指南TNM分期均评估为T1N0M0,未行活检。入路主要通过术者既往手术经验选择,若手术难度较低,则行后腹腔镜手术,若手术难度较高,考虑行传统后腹腔镜手术保肾困难,则行机器人辅助手术,另外由于机器人手术花费高,也会考虑到患者的经济水平。3 组一般资料除性别外均无统计学差异,有可比性,见表 1。3 组每年手术量见表2,2017 年1 ~ 8 月肾部分切除术根据R.E.N.A.L.评分的肿瘤复杂程度分级见表3,3组无显著性差异( Kruskal-Wallis H 检验,χ2 = 1. 481,P = 0. 477) 。

1.2 手术方法
RARPN 组及 RALPN 组采用 da Vinci Si 机器人系统,LPN 组采用 Storz 腔镜手术系统。肾部分切除术的具体方法参考我单位已发表文献。
1.3 观察指标
从病历提取各组手术时间( 包括机器人装机时间) 、热缺血( 肾动脉阻断) 时间、术中出血量( 由沾血纱布数量及吸引器内吸血量估测) 、术后病理切缘阳性率、术后引流管拔除时间以及术后并发症发生率等。术后2年内每3~ 6个月随访一次,2年后每年随访一次,包括血尿常规、肝肾功能以及胸片、B超或 CT等。
1.4 统计学方法
采用 SPSS22.0软件进行统计学处理。计量资料用 ![]() ± s 表示,3组比较采用One-way ANOVA,有差异项目两两比较采用 LSD。计数资料3组间比较采用卡方检验。等级资料 3 组间比较采用 Kruskal-Wallis H 检验。均以P<0.05 为差异有统计学意义。
± s 表示,3组比较采用One-way ANOVA,有差异项目两两比较采用 LSD。计数资料3组间比较采用卡方检验。等级资料 3 组间比较采用 Kruskal-Wallis H 检验。均以P<0.05 为差异有统计学意义。
2 结果
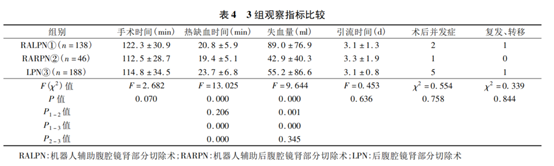
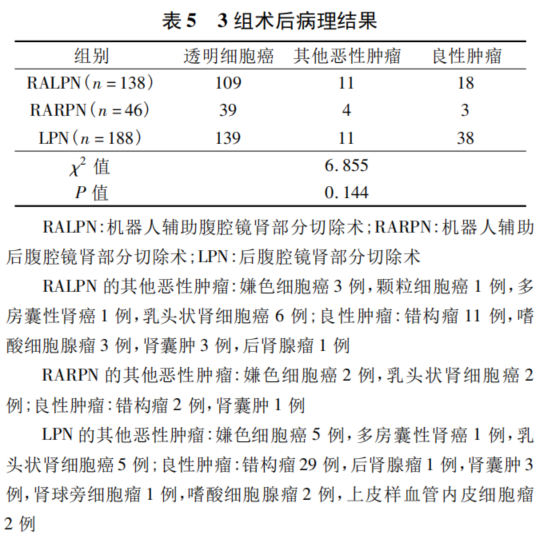
RALPN 组5例、RARPN 组1例、LPN 组5例单肾双发肿瘤,均同时切除双发肿瘤。3 组观察指标比较见表4。3组手术时间及引流时间无明显差异(P>0.05),机器人辅助腹腔镜手术时间包含机器人系统装机时间。热缺血时间RALPN 和RARPN明显短于LPN(P<0.05) ,RALPN 与RARPN 之间无显著差异(P>0.05)。术中出血量RALPN明显多于RARPN 和LPN(P<0.05),RARPN与LPN之间无显著差异(P>0.05)。LPN 组术中输血1例,余无术中输血。RALPN组2例术后并发症,均为术后出血,予以选择性动脉栓塞术后治愈;RARPN组1例术后并发症,为术后出血合并急性心肌梗死,予以选择性动脉栓塞术及保守治疗治愈; LPN组5例术后并发症,包括2例尿漏、1例术后出血及2例术后血尿,尿漏者1例予以双J管置入,1例予以穿刺造瘘,术后出血者予以输血及保守治疗,术后血尿者予以绝对卧床及药物保守治疗,均治愈。3 组并发症发生率无显著差异(P>0.05) 。随访时间1~48个月,RALPN组1例术后3个月脑转移死亡,RARPN组无复发、转移,LPN 组1例术后4个月复发,于外院行肾根治性切除术,1例因其他疾病死亡。术后病理见表5,3组无显著差异,术后病理提示切缘均为阴性。
3 讨论
腹腔镜泌尿外科手术失血量低,患者术后疼痛轻,但学习曲线长,器械不完全符合人体工程学待点,手术操作时间长,易导致术者疲劳,目前尚无法完全替代开放手术。达芬奇机器人手术系统具备 3D 视野、仿腕型器械及防震颤系统,相比传统腹腔镜技术学习曲线低,手术并发症发生率低,已成功应用于保留肾单位的肾部分切除术。本研究比较单一术者在一段时间连续完成的传统腹腔镜肾部分切除术以及两种入路机器人辅助肾部分切除术,3组一般资料无明显差异。术者在具备了一定的机器人辅助系统操作经验后,开展机器人辅助腹腔镜肾部分切除术,并在后期逐步开展机器人辅助后腹腔镜肾部分切除术,机器人辅助腹腔镜手术的比例随术者经验逐年升高(表2) 。除机器人手术的比例增加外,经后腹腔的RALPN所占比例逐年增加,RALPN及RALPN术前一般资料及围手术期观察指标无明显差异。我们认为,经腹腔途径空间较大,解剖标志清晰,适合初学者开展机器人辅助腹腔镜肾脏手术; 而当术者具备了一定的机器人手术经验后,后腹腔入路行机器人手术在处理位于肾上极、肾脏背侧的肿瘤或有腹腔手术史的患者时,其优势便显现出来。本组RALPN的热缺血时间及手术时间均略短于 RALPN,但无统计学意义(P>0. 05) ,考虑可能与样本量较少有关。但随着手术经验的积累,RARPN的应用范围将比RALPN广泛,相比经腹入路,后腹腔入路行肾脏手术更符合中国泌尿外科医生的习惯。且 RALPN 需要装配3个机器人机械臂,而RALPN通常使用2个机械臂,可以减少住院费用。
根据我们的经验,随着机器人手术经验的积累,机器人辅助腹腔镜手术较传统腹腔镜手术更适合对复杂肾肿瘤实施保留肾单位手术,可扩大肾部分切除术的适应证,使部分原本无法行后腹腔镜肾部分切除术的复杂高难度肾肿瘤患者获益。这与国外学者意见一致。Khalifeh等对比单一术者500例RALPN(n = 269) 和 LPN(n = 231) 后得出结论: 机器人手术系统能够处理较大或较复杂的肿瘤,可扩大肾部分切除术的适应证。Miyake 等认为,RALPN可以减少肿瘤切除难度评分对围手术期参数(热缺血时间、手术时间、手术失血量) 的影响,使原本较为复杂的肾脏肿瘤可以尽可能地保留正常肾组织。同时该团队对比了开腹手术与RALPN 对肾门部肿瘤的手术疗效,认为RALPN在处理肾门部肿瘤
时不仅疗效等同于传统开腹手术,且术后恢复较快。Long 等对比R.E.N.A.L.评分>7分的381例RALPN(n = 199)及LPN(n = 182),LPN处理复杂肾肿瘤时转根治率大于RALPN( 11.5% vs .1% ,P<0.001) 。da Vinci系统配套的术中超声系统、近红外荧光成像及吲哚菁绿染色均有助于完全内生型肾脏肿瘤切除。本组 2017年1~8月82 例肾部分切除术中,对于较复杂的R.E.N.A.L.评分≥10分的肿瘤优先选择机器人辅助手术(表3) ,对经济情况较差者则考虑选择后腹腔镜手术。而对于评分较低的肾肿瘤,机器人手术仍具备操作便利等优势,可使患者获益,但需考虑患者的经济因素。机器人手术系统价格昂贵,术式选择时需要术者慎重考虑高花费的治疗能否给患者带来显著的优势。Yu等认为,目前市场上机器人手术系统价格高昂,但微创手术减少了术后止痛药物的使用及术后住院时间,加速术后康复,早日恢复正常工作及生活,在一定程度上抵消了高昂的手术费用。
机器人手术系统的应用不仅扩大手术适应证,也缩短热缺血时间,并保护肾功能。我们体会,对于一些较复杂的、应用腹腔镜技术较难行保留肾单位手术的肾肿瘤(如肾门部肿瘤),在应用机器人手术系统后则可顺利完成保留肾单位手术。机器人辅助腹腔镜手术可以取得较短的热缺血时间,更好地保护肾功能。Shiroki等认为,肿瘤组织与正常肾组织的接触面积可显著影响热缺血时间,进而影响术后短期肾功能,而正常肾组织的保留量则影响长期肾功能。而应用机器人系统行RALPN 则可以在处理较大肾脏肿瘤时尽量保存较多正常肾组织。另外,本研究中3组手术时间无明显差异,但是机器人手术系统需要在trocar建立后进行装机及移入,增加总体手术时间,因此RALPN及RALPN腔内操作时间应略短于LPN。
机器人辅助手术还具备学习曲线较短的优势,经验丰富的腹腔镜医生通常连续完成 5 例机器人肾部分切除术即可从腹腔镜肾部分切除术过渡到机器人手术。谢永鹏等的研究显示,一个资深泌尿外科医生经过9例机器人肾部分切除术后,RALPN的手术时间就可达到最近20例 LPN 的平均手术时间。尽管行机器人手术时术者需通过助手进行吸引、阻断血管及触碰肿瘤等操作,但助手的经验对手术效果影响较小。本组资料包括单一术者最初开展的机器人肾部分切除术,初期开展机器人手术时仍以后腹腔镜肾部分切除术为主,但随着手术经验的增加,机器人辅助腹腔镜手术的占比逐渐增加。
查看更多
 中国医学论坛报
中国医学论坛报 壹生
壹生 今日肿瘤
今日肿瘤 今日循环
今日循环 今日糖尿病
今日糖尿病 今日口腔
今日口腔 全科周刊
全科周刊 脱贫地区农副产品网络销售平台
脱贫地区农副产品网络销售平台
京公网安备 11010202008182号
| 互联网新闻信息服务许可证编号:10120190017