



200
评论
查看更多
密码过期或已经不安全,请修改密码
修改密码
壹生身份认证协议书
同意
拒绝
同意
拒绝
同意
不同意并跳过




来源:浙江大学医学院附属第二医院宣传科
作为生命中枢,人类的大脑和脊髓被强大的“盔甲”——颅骨和脊柱重点保护着。因此,就手术操作而言,手术器械通常首先要破开颅骨或脊柱椎板,通过狭窄通道推送精密手术器械,穿越曲折路径,在狭小的中枢神经空间环境中进行精细手术操作。由于神经结构的重要性及脆弱性,相对于其他的外科手术,神经外科手术有着更高、更精细、更稳定的要求。当前盛行的达芬奇机器人的手术操作,常常可以在一个类似篮球大小的空间内进行,而神经外科手术则要求在网球甚至乒乓球大小的空间内完成,这就对手术器械的设计和操控提出了更高的要求。
多自由度、可灵巧作业的微型手术机器人处于医疗机器人领域的前沿,尤其是能充分利用人体自然腔道从而避免体外手术切口的微创手术机器人。理想的手术机器人,既需要具有被动柔顺性以穿越曲折的解剖结构,又具有主动灵巧操控性以在远端目标处操作。这里存在两大挑战:一是要求细长的导管既能体现柔性以保护组织,又需要有足够刚性支撑以施加操作力,二是要求其运动既具备被动柔顺的能力以通过弯曲通道,又需具备主动控制的多自由度以完成末端操作。简言之,就是要求机械臂可刚可柔、能屈能伸地通过狭长管道,末端还能操纵绣花针。
近日,浙大二院朱永坚教授团队联合浙江大学机械工程学院杨克己教授、金浩然研究员团队在《Nature Communications》杂志发表题为“Bioinspired handheld time-share driven robot with expandable DoFs”的论文,提出了一种分时驱动、多个弯曲运动模块串接而成的蛇形微创手术机器人,可以仅由一根柔性可弯曲的软轴驱动,具备多自由度运动能力,通过狭小受限空间并完成远端操作。博士研究生王云江和胡鑫奔为共同第一作者,金浩然研究员和朱永坚教授为共同通讯作者。
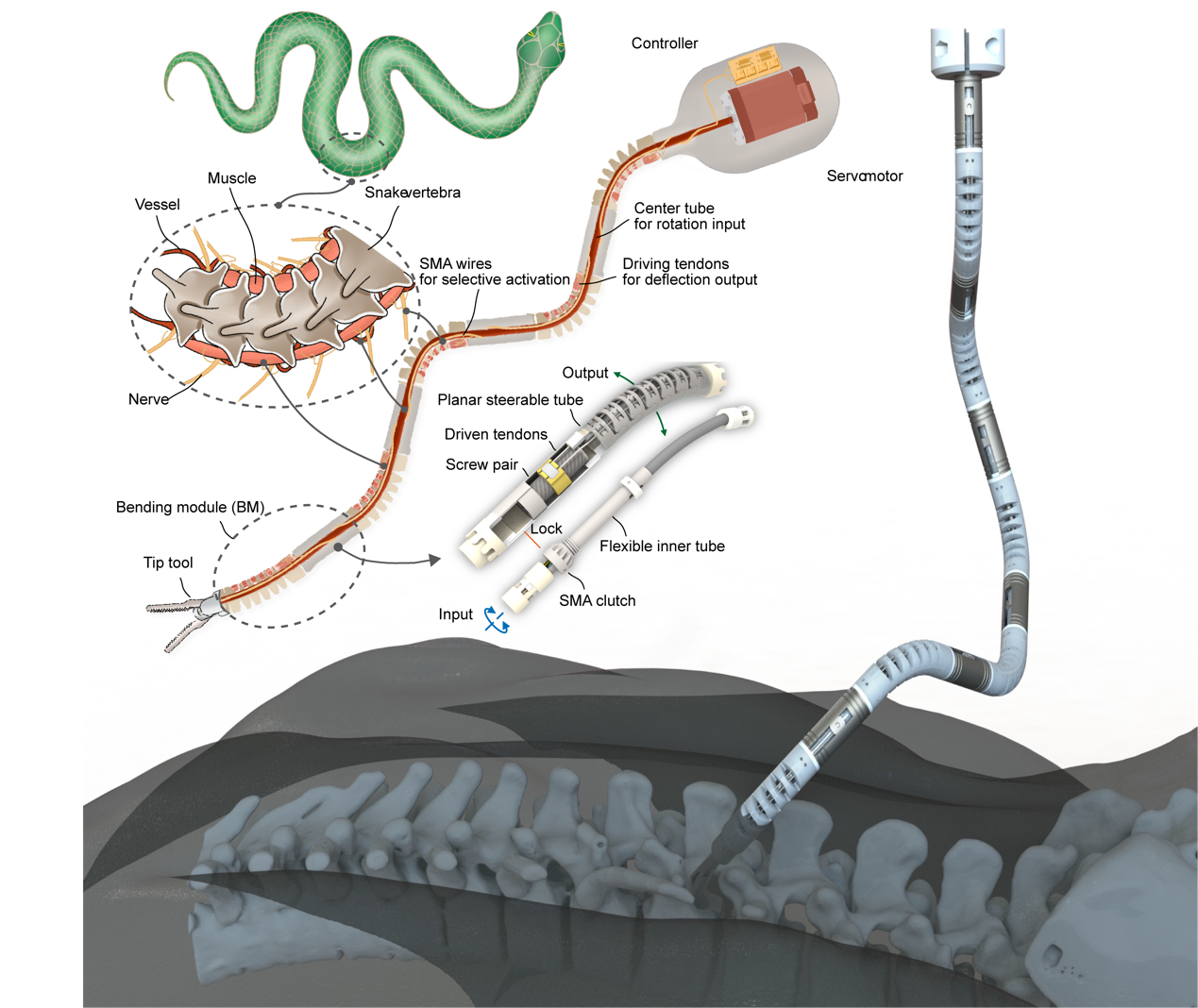
以蛇为灵感的仿生模块化分时驱动机器人
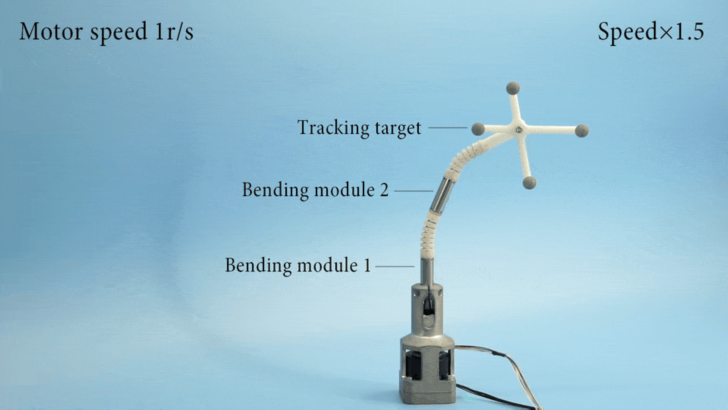
课题组从蛇的解剖结构获得启发,通过同心嵌套两根可弯曲抗扭的不锈钢编织管组成了手术机器人的延长段,从而可以被动适应通过复杂的腔道,同时传递两根嵌套管的相对旋转。一定数量的单自由度弯曲模块同样由内外嵌套结构组成,形成操作端组装在延长段后。每一个弯曲模块都可独立地由统一旋转输入驱动,使得机器人可分时、独立地控制每一个节段来实现远端受限空间内的复杂操作。此外,操作者还可以灵活增裁弯曲模块数目,依据实际手术需求进行个性化组装。
机器人同时具有“软”的适应性和“硬”的操作力,有能力通过人体自然腔隙或孔道完成远端精细化操作。该研究为机器辅助手术提供了一种新的思路,在此基础上,本课题组正在研制一种新型软硬组合式经皮脊柱内镜手术系统,致力于为拓展经皮脊柱内镜的手术适应证,为更多的脊柱脊髓疾病患者带来福音。
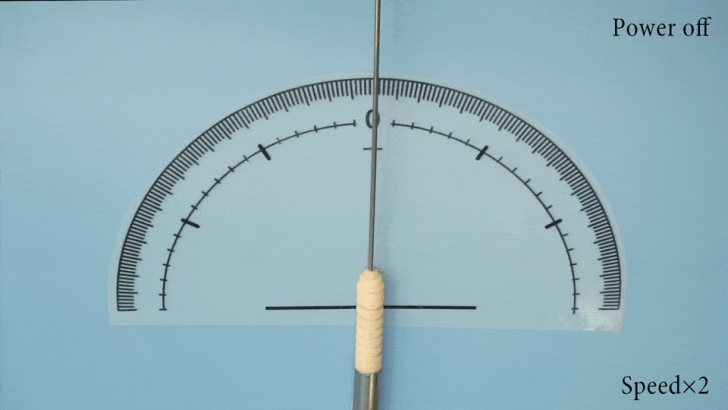
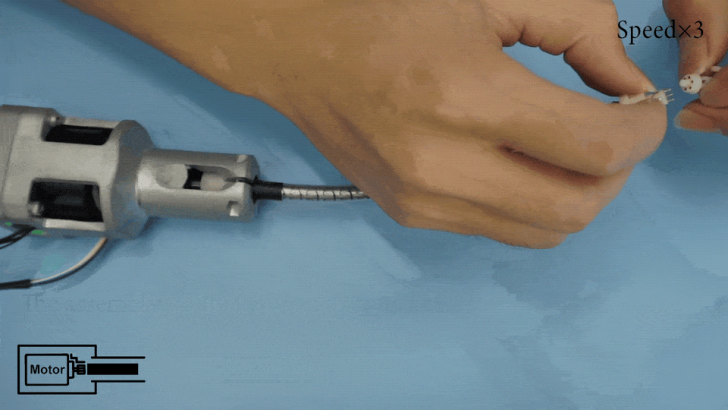
左右滑动查看更多


全文:Wang Y, Hu X, Cui L, Xiao X, Yang K, Yong J, Hao R . Bioinspired handheld time-share driven robot with expandable DoFs. Nature Communications. 2024;15(1):768. doi:10.1038/s41467-024-44993-x

朱永坚教授
朱永坚,男,教授、主任医师,博士生导师,浙大二院神经外科副主任、三病区主任。浙江省医学会神经外科学分会候任主任委员,浙江省医学会神经外科学分会脊髓脊柱学组组长,中华医学会神经外科学分会脊髓脊柱病学组委员,中华医学会神经外科学分会青年委员等。擅长各类复杂脊髓脊柱疾病的疑难诊治,尤其是髓内肿瘤、复发性肿瘤、脊髓先天畸形、脊髓血管病等的微侵袭手术及颈腰椎间盘突出的经皮内镜手术,带领团队首创完成无辐射导航下孕妇脊髓肿瘤微创手术、完成国际首例颈椎椎间孔区神经鞘瘤的经皮内镜手术,并在此基础上开展医工融合的脊髓脊柱无辐射导航及机器辅助手术研究。
浙大二院神经外科脊髓脊柱亚专科团队,成员包括朱永坚教授、应广宇主任医师、谷驰副主任医师、陈敬寅副主任医师等。团队以微侵袭手术为特色开展涵盖脊髓肿瘤、脊髓血管畸形、脊髓先天性畸形,同时以经皮脊柱内镜手术技术为特色,开展颈腰椎间盘突出为代表的脊柱退行性疾病微创手术。并在神经外科及脊髓脊柱微创手术的前沿领域,开展医工融合脊髓脊柱无辐射导航和机器人辅助手术的研究工作。
查看更多
 中国医学论坛报
中国医学论坛报 壹生
壹生 今日肿瘤
今日肿瘤 今日循环
今日循环 今日糖尿病
今日糖尿病 今日口腔
今日口腔 全科周刊
全科周刊 脱贫地区农副产品网络销售平台
脱贫地区农副产品网络销售平台
京公网安备 11010202008182号
| 互联网新闻信息服务许可证编号:10120190017