


200
评论
查看更多
密码过期或已经不安全,请修改密码
修改密码
壹生身份认证协议书
同意
拒绝
同意
拒绝
同意
不同意并跳过




技术前沿
食管癌机器人手术创新之胸部“四臂五孔法”在McKeown术式中的应用
岳杰, 王尚任, 陈作宇, 段晓峰, 弓磊, 张辰
(天津医科大学
肿瘤医院)
食管癌是严重危及人类健康的恶性肿瘤,其发生率居全部恶性肿瘤的第6位、死亡率居第4位。目前食管癌的治疗方法中,手术仍占据重要地位。其中,机器人辅助下的食管癌切除术,因其操作灵活、清扫范围大、无手术死角、创伤小、恢复快等优势[1],成为食管外科的发展方向。
01
技术简介
目前,机器人辅助食管癌切除手术的胸部操作,以“三只机械臂+助手辅助”模式为主,该术式依赖助手的配合,且未能充分利用手术机器人的全部机械臂[2-3]。本团队通过积累机器人手术的经验,逐渐探索出了新的手术模式:四臂五孔法。
02
操作要点
1 手术场景布置
1)患者体位:左侧卧位,略向前倾,右手抱头(图1)。2)手术机器人的相对位置:手术床左侧,机械臂由患者腹侧方向进入。

2.2 机器人手术平台设置
1)选择手术为胸部。2)选择手术平台与患者的位置关系为患者左侧。3)手术平台移动。巡回护士操控手术平台,使定位十字光标对准目镜穿刺孔。以目镜穿刺孔为中心,逆时针旋转机械臂至与患者平行,具体标准为与1号臂、3号臂连线平行。整体下降机械臂平台至穿刺孔高度。4)手术操作:操作可由主刀独立操作完成,在手术过程中根据需要,可灵活切换手术器械。如手术室有双机位,可由主刀及助手共同操作完成手术。本文描述的手术步骤,均由主刀独立操作完成。今后将进一步探索双机位操作技巧。
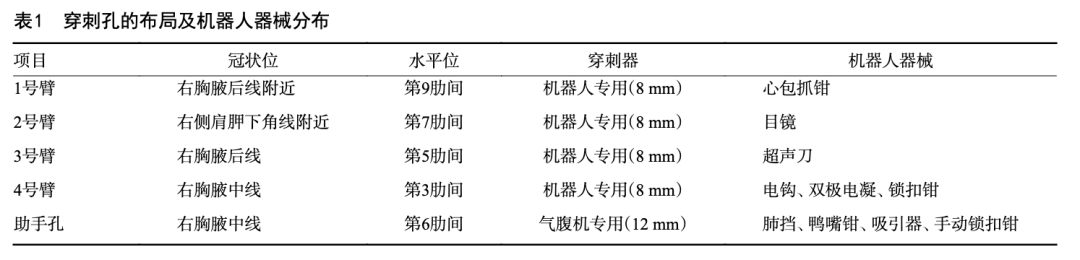
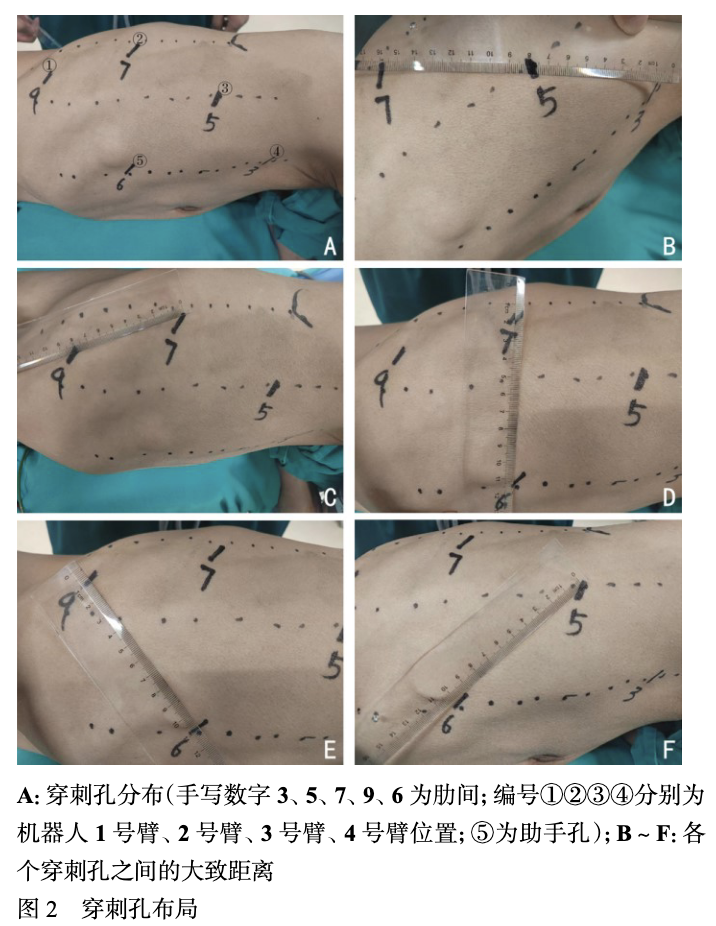
2.3 穿刺孔布局(四臂五孔法)
在“四臂五孔法”的设计中,在第3肋间、第5肋间、第7肋间、第9肋间布局4个穿刺孔用以放置4个机器人器械臂,在第6肋间建立助手孔(表1,图2,图3)。
03
小结
3.1 四臂法技术优势
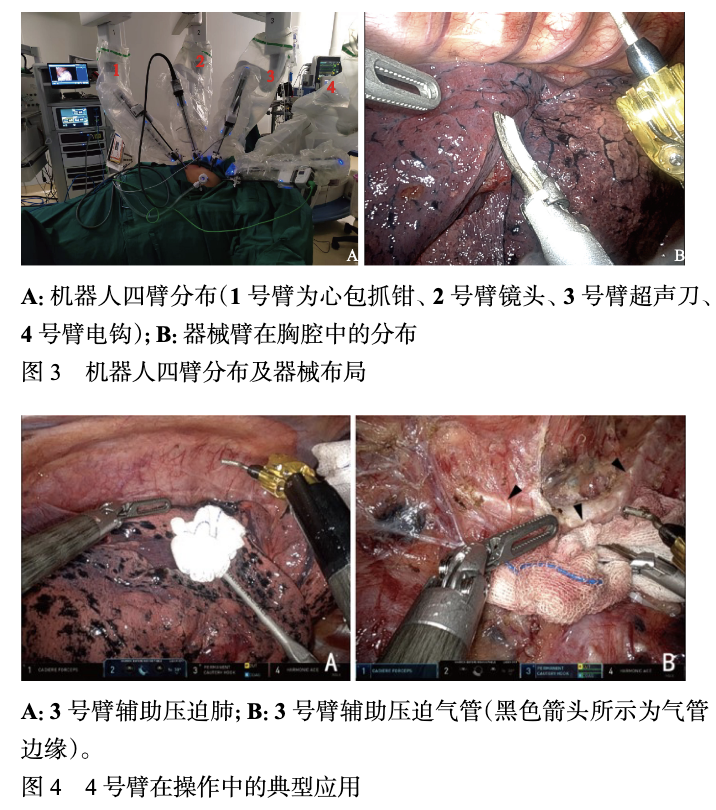
优势一:加强了术者对手术的操控。首先术野的暴露更充分,更确切,且损伤更小。传统三臂法对助手的依赖性很大。如,在下纵隔操作中需使用三叶钳遮挡肺组织,以充分暴露食管术野。在左侧喉返神经旁淋巴结清扫的过程中,需助手用力下压主气管,以利于术者游离神经和清扫软组织。在四臂法实践中,使用了3号臂的超声刀夹持纱布团来压迫肺和气管(图4)。纱布团的摩擦力更大、接触面积更大、压强更小,效果更好。同时所需的力度更小,造成的损伤自然也更小。另外,对视野的暴露能够随着手术进程由术者自主随时调整,不像三臂法那样需要与助手沟通,减少甚至杜绝了因为助手不熟悉手术流程或不了解术者意图,造成误操作或误损伤的可能性。
其次术者操作更加便利。传统三臂法中,围绕食管的操作可以分为3个部分:1)提拉食管:1号臂由术者操控,使用心包抓钳上拉食管或者食管牵引带;2)暴露术野:助手使用三叶钳或鸭嘴钳,与1号臂做反向操作,以充分暴露、提供张力;3)能量操作:3号臂由术者操控,使用能量器械(超声刀或者电钩)完成切割、止血等动作,在操作中需助手配合更换能量器械,该过程烦琐、对配合的要求高,若助手不够成熟或不够稳定,可能会影响手术进程。完成一个操作后,需要不断重复该过程,反复调整。四臂法针对以上的不足之处,进行了两种不同方向的改进。简单的方法是单纯的替换助手,即使用3号臂的超声刀夹持纱布团,替代助手的作用。使用4号臂的能量器械完成手术操作,操作同三臂法。
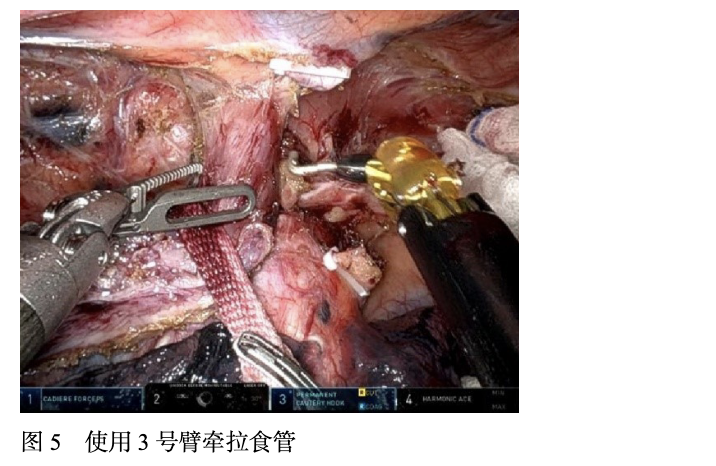
“四臂法”较“三臂法”改动较大的途径则是调整了各个机械臂的功能。1)提拉食管:3号臂由术者操控,使用超声刀上拉食管牵引带(图5)。2)暴露术野:1号臂由术者操控,使用心包抓钳,与3号臂做反向操作,以充分暴露、提供张力,并能够提供部分的保护功能。3)能量操作:主能量器械放置于4号臂并由术者操控,如使用电钩完成手术操作,并在操作中可与3号臂的能量器械(如超声刀)灵活切换。
由机械臂完成食管的牵拉工作,持久且稳定,不会出现因术者颤抖或乏力造成的术野摇晃;且能够随着手术进程,不断微调,以提供更优的手术视角。充分上提食管,提供了更大的组织间张力,也提供了更多的发力角度。1号臂仅需简单的操作就能够达到要求,可以把更多的精力放到对突发事件的保护上,如凝血不充分造成的出血,可以及时反应,进行夹闭等。
再次增加了术中操作组合的方式,拓展了可能性。传统三臂法仅有1种排列方式,即目镜居中,双手环抱的操作。四臂法虽然仅增加了一个操作孔,但其排列组合方式增加了一个数量级。目前的实践仍然以三臂法为基础,尽量减少术中机械臂位置的切换。但是在手术中发现调整目镜的位置,也能够对特定区域的手术产生帮助。如,在上段食管的游离中,可将目镜转移至第五肋间(即3号臂),使视野更清楚,此时改变目镜位置似乎就是更合理的改变。此外,除了位置的改变,还可以更换不同的机械臂配件,再如,电钩与双极电凝的组合,超声刀和双极电凝的组合等。在不同的操作场景中,选择最适合的器械或器械的组合,将对手术产生极大的便利。其他优势为机械臂基本保持平行分布,臂件之间的干扰小。该分布模型,无论是对上纵隔操作,还是对下纵隔操作,均可保证无同一平面内的臂件交叉。因此,操作流畅,无相互干扰。
优势二:减少了器械的更换。机器人手术中,更换器械是造成手术不流畅的重要原因。术中频繁更换器械,会打乱术者的手术节奏。如,当遇到较粗的血管时,常会撤下电钩,更换为超声刀离断血管,然后再换回电钩继续游离的操作。这样的操作需要助手的配合,且需要对机械臂配件的反复识别,会浪费一些时间,进而也会影响术者的思路和节奏。四臂法对其有重大改进,将上述复杂的操作全部省略,仅需左脚轻触切换键即可瞬间完成能量器械的更换。操作简单,不需要助手的配合,大量节省了手术时间。对于术中紧急情况(如出血等),减少了更换器械的步骤,使反应速度更快,处理更加及时,极大地增加了安全性。
优势三:减少了患者的损伤。四臂法因为减少了助手操作,并且由主刀控制机器人四个机械臂,手术过程中降低了对术区干扰,减少了对患者损伤。减少了肺挫裂伤的风险。传统三臂法,由助手使用钢制的三叶钳来遮挡肺组织,不可避免对肺组织会造成揉搓,且力度较大。四臂法使用纱布团压迫,力度更小,调整更加灵活,损伤更小(图4A)。减少了对气管的损伤,游离上段食管及清扫左侧喉返神经旁淋巴结的过程中,需要对主支气管进行压迫。与前面类似的,使用纱布团较三叶钳效果更稳定,且损伤更小(图4B)。减少了对心脏的影响,三臂法中,在下纵隔游离食管和清扫膈上淋巴结的过程中,常需要助手大力压迫心包,才能产生良好的暴露效果。其付出的代价是心脏的暂时功能失调,表现为血压下降、心率下降、心律失常等,通常需要暂停手术,甚至取消气腹,才能慢慢恢复。增加了手术时间,也增加了患者的风险。造成这种情况是由于助手仅有向下压迫心包一种发力方向,且三叶钳动作较为粗暴所导致。四臂法提供了更优的解决方案:首先,3号臂向上牵拉食管非常稳定,且能够提供充分的张力。其次,1号臂在3号臂充分上提的前提下,能够充分发挥“可转腕”的优势,沿平行于心包的方向发力也能够提供足够的空间和张力,其动作也更轻柔,从而根本上解决了心脏受压的风险。另外减少了对左侧胸膜、胸导管等损伤。向胸骨方向对食管的充分牵拉,能够远离胸膜、胸导管等组织结构,有利于操作的同时,能够减少对其损伤的几率。
优势四:减少助手的操作,工作强度明显下降。减少了沟通成本,效率更高。如前所述,三臂法对助手的依赖性很高。并且在术中需要反复沟通,助手要集中注意力,及时回复。对术者和助手的要求都很高,且压力巨大。四臂法大部分操作是术者独立完成的,没有沟通成本,效率明显提升。助手仅发挥传递物品和特殊情况下的辅助操作,其工作强度和工作压力明显下降。减少了对助手的依赖,更有利于手术的标准化和规范化。当术者对手术的掌控度进一步提高,手术的质量控制较为容易完成。通过对术者操作的规范,更容易达到术式标准化。
3.2 新术式面临的挑战和解决方案
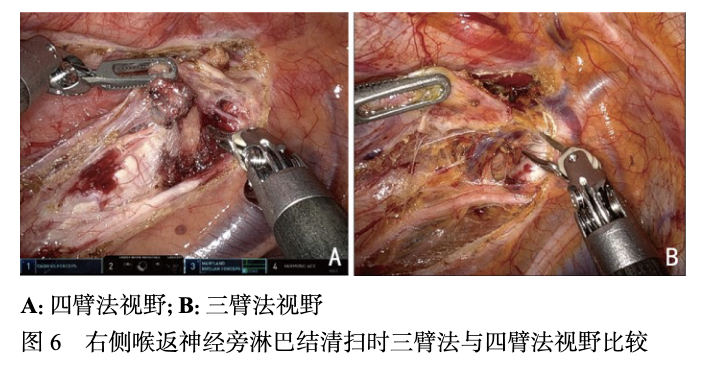
首先手术视角的变化。三臂法的目镜位于第6肋间,基本位于纵隔的中间部位,对于上下纵隔的操作均很方便,基本始终能够保持俯视的“上帝视角”。四臂法的目镜位于第7肋间并位于下纵隔,对于下纵隔的操作会更加便利;但是中纵隔和上纵隔的操作时,视野会受到部分限制。如处理奇静脉弓时,观察弓上缘会有困难,需要将奇静脉弓略向下方牵拉才能完成操作。另外,在处理复杂的右侧喉返神经旁淋巴结清扫时,视角略偏下方,并非俯视角度,通过调整镜头位置,两者的视角无明显差异,基本不会影响术者的操作(图6),需术者重新适应。
其次器械使用规范。实践中,为了最大化地发挥能量器械的作用,采用了3号臂装载超声刀的方案。在食管游离过程中,使用超声刀夹持纱布团压迫肺或牵拉食管牵引带,发挥了重要的作用。但是,该使用方案并未完全遵循机器人机械臂配件“专物专用”的原则。因为这样的术式并未见于专著或机器人手册,无成熟经验可以借鉴,因此仅在不违背大原则的基础上不断摸索。目前可以采用3号臂配备另外一把心包抓钳的方案来改良该方案,如此即可符合使用规范。此外,可以设计一些机械臂配件来使用。如,类似“Tip-up”长头的、大接触面的“肺挡”;尖端略弯曲、能够钩住气管软骨环的抓钳等。适应证受限,三臂法因孔位较少,所以能够保证所有孔位之间的距离均大于8 cm。臂件之间基本无干扰。四臂法受患者的体型的限制较大。当患者体型较小时,很难保证孔位之间的距离大于8 cm。略小于8 cm时,臂件的干扰并不大,但当孔位距离小于6 cm时,手术将难以流畅进行。因此,四臂法并不适用于体型较小的患者。另外,此法对术者的要求较高。对于成熟的腔镜外科医师而言,机器人三臂法很容易操作。而四臂法因为涉及机械臂的反复切换及对其相对位置的空间思考,所以并不适用于初学的机器人术者,更适合熟练使用机器人的外科医师使用。因为第四臂取代了助手的存在,所以术者的工作量也较前增加,对其精力要求和所面临的压力均略有增大。
3.3 设计思路与难点
胸部通道布置的难点在于肋骨的限制。食管平行于脊柱、垂直于肋骨,因此食管手术的通道布置只能选择在不同的肋间,有局促感。在设计上,选择了“直线型”作为基础,遵循了“8cm孔间距”的原则。1)确定目镜的置,2号臂在第7肋间。因为要在右侧设置两条机械臂,所以目镜只能尽量向下。为了保证能够观察整个纵隔的全长,这个位置是能选择的最低的肋间。2)4号臂的位置较为固定,即第3肋间。理论上,第2肋间、第4肋间也是可能的选择,但是位置过高难以抵达膈肌裂孔部位,而过低又会与其他机械臂产生干扰。因此,第3肋间就成为了最佳的选择。3)1号臂的位置在第9肋间,其位置相对灵活。肋骨自后上向前下走行,因此只要与2号臂孔位之间保证8 cm间距即可。综上所述,过高或过低的肋间也不合适。若纵隔较短,第10肋间能够触及胸顶,也可以作为备选。4)3号臂位置确定在第5肋间。主要受第3肋间和第7肋间的限制,具体位置需要测量以保证孔距。术者经验表明,与4号臂的距离一般会超过8 cm;重点在与2号臂的距离,需测量距离后确定具体位置。
需要特别说明的是,穿刺孔的布局不是固定的,其会随着患者体型、食管位置、病变位置、手术重点等因素变化。如老年患者多伴有脊柱侧弯(俗称“罗锅”),此时食管常位于视野的深处,因此建议穿刺孔整体向前胸壁侧挪动,以获得更好的视野。再如有些患者的食管位于主动脉的左侧,即手术视野的深面。此时,同样要将穿刺孔整体向前胸壁侧挪动,以获得更好的视野。否则主动脉和脊柱会严重影响操作。
3.4 临床实践总结
目前使用该术式共5例,均顺利恢复。无围手术期死亡,无吻合口瘘等并发症。胸腔平均清扫淋巴结18.75±7.14枚,其中左侧喉返神经旁淋巴结 4.67±3.79枚,右侧喉返神经旁淋巴结4.67±2.52枚。
来源:中国肿瘤临床
查看更多
 中国医学论坛报
中国医学论坛报 壹生
壹生 今日肿瘤
今日肿瘤 今日循环
今日循环 今日糖尿病
今日糖尿病 今日口腔
今日口腔 全科周刊
全科周刊 脱贫地区农副产品网络销售平台
脱贫地区农副产品网络销售平台
京公网安备 11010202008182号
| 互联网新闻信息服务许可证编号:10120190017